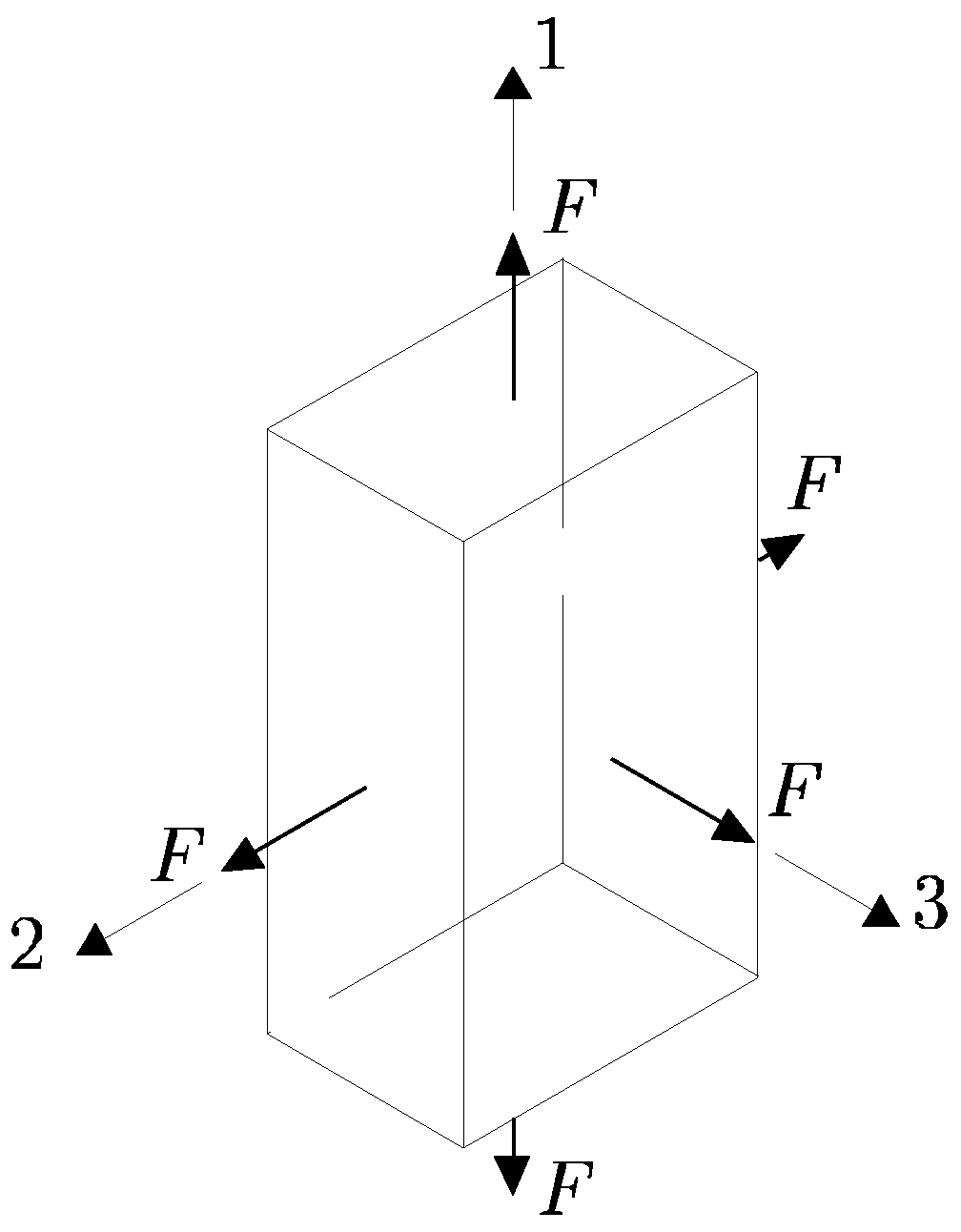
Sea una barra de sección transversal rectangular sometida en sus caras a fuerzas longitudinales de tracción de valor ![]() que se suponen repartidas uniformemente en la sección. Se consideran los ejes de referencia como principales, tal como se muestra en la Figura 4.5.
que se suponen repartidas uniformemente en la sección. Se consideran los ejes de referencia como principales, tal como se muestra en la Figura 4.5.
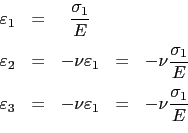
Considerando exclusivamente la fuerza en la dirección 1, el estado tensional en el sólido es
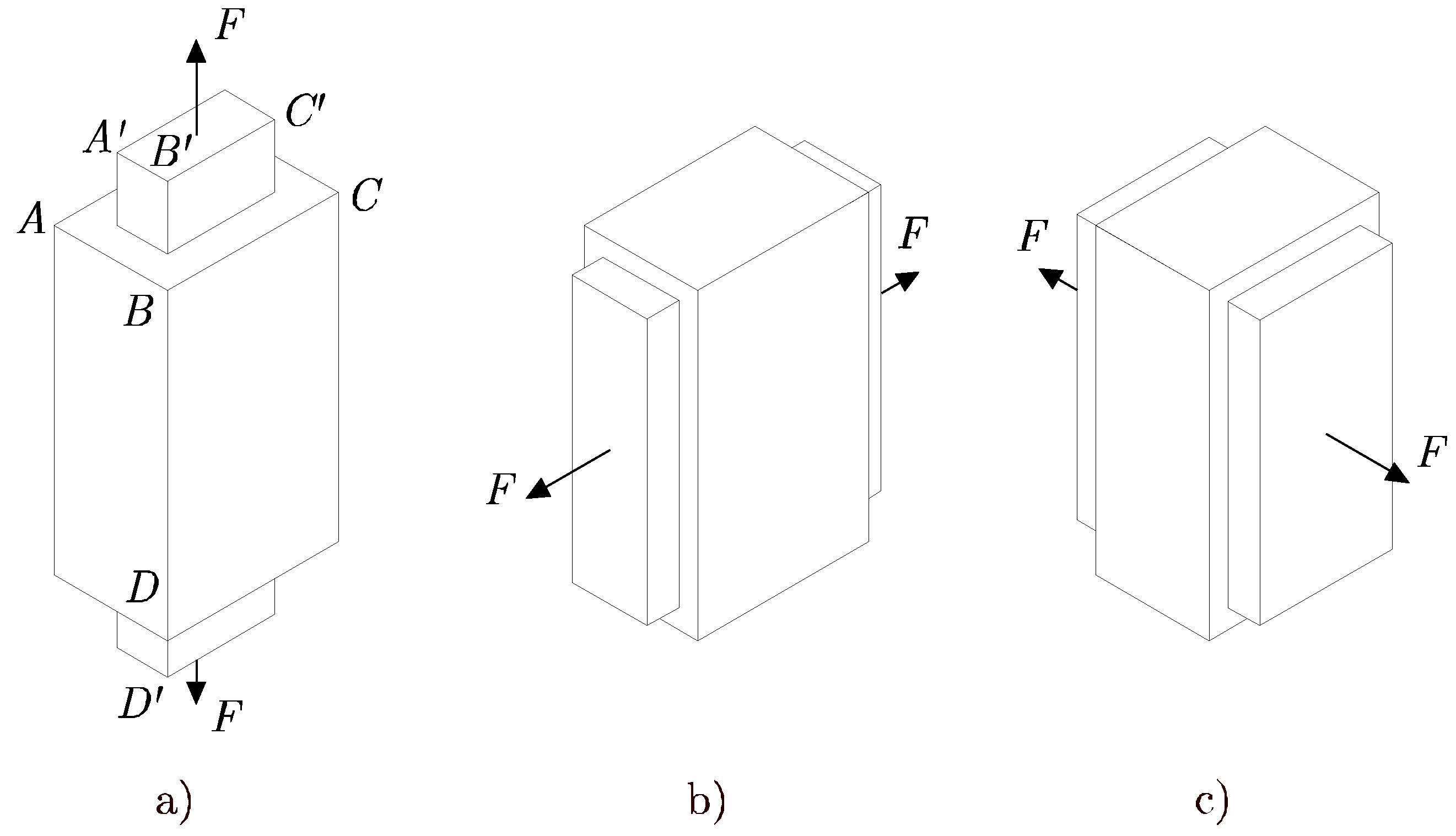
siendo ![]() el área de la sección normal al eje 1. Para este estado tensional, las deformaciones, Figura 4.6 a), que se producen en el sólido son
el área de la sección normal al eje 1. Para este estado tensional, las deformaciones, Figura 4.6 a), que se producen en el sólido son
Los subíndices 1, 2 y 3 indican las deformaciones en las direcciones principales. La ecuación (4.15) proporciona el alargamiento unitario en dirección principal 1, mientras que las expresiones (4.16) y (4.17) proporcionan la contracción transversal unitaria según las direcciones principales 2 y 3, respectivamente.
Teniendo en cuenta el tipo de solicitación, la simetría de la pieza y las hipótesis de isotropía y homogeneidad del material, se puede afirmar que no existe deformación tangencial o deslizamiento, es decir
Al considerar un comportamiento elástico del material es posible aplicar la ley de Hooke:
Si se consideran los efectos de las fuerzas en las direcciones 2 y 3, Figura 4.6 b) y Figura 4.6 c), se llega a expresiones similares a las anteriores, tal y como se muestra en la Tabla 4.1.
| Eje | Deformaciones producidas por | ||
| 1 |
|
|
|
| 2 |
|
|
|
|---|---|---|---|
| 3 |
|
|
|
Al ser lineales las ecuaciones, se pueden superponer los efectos para determinar las deformaciones unitarias totales:
Estas ecuaciones constituyen la ley de Hooke generalizada en las direcciones principales.
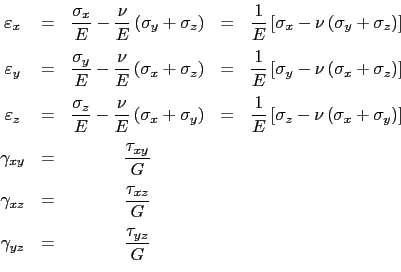
En un sistema de referencia no principal, la ley de Hooke toma la siguiente forma:
Las expresiones anteriores constituyen la Ley de Hooke generalizada para materiales homogéneos e isótropos en ejes cualesquiera, y coinciden con las expresadas en la ecuación (4.13).



![\begin{displaymath}\begin{array}{ccccc}
\varepsilon_1 &=& \displaystyle\frac{\s...
...[\sigma_3-\nu\left(\sigma_1+\sigma_2\right)\right]
\end{array}\end{displaymath}](img409.png)