 |
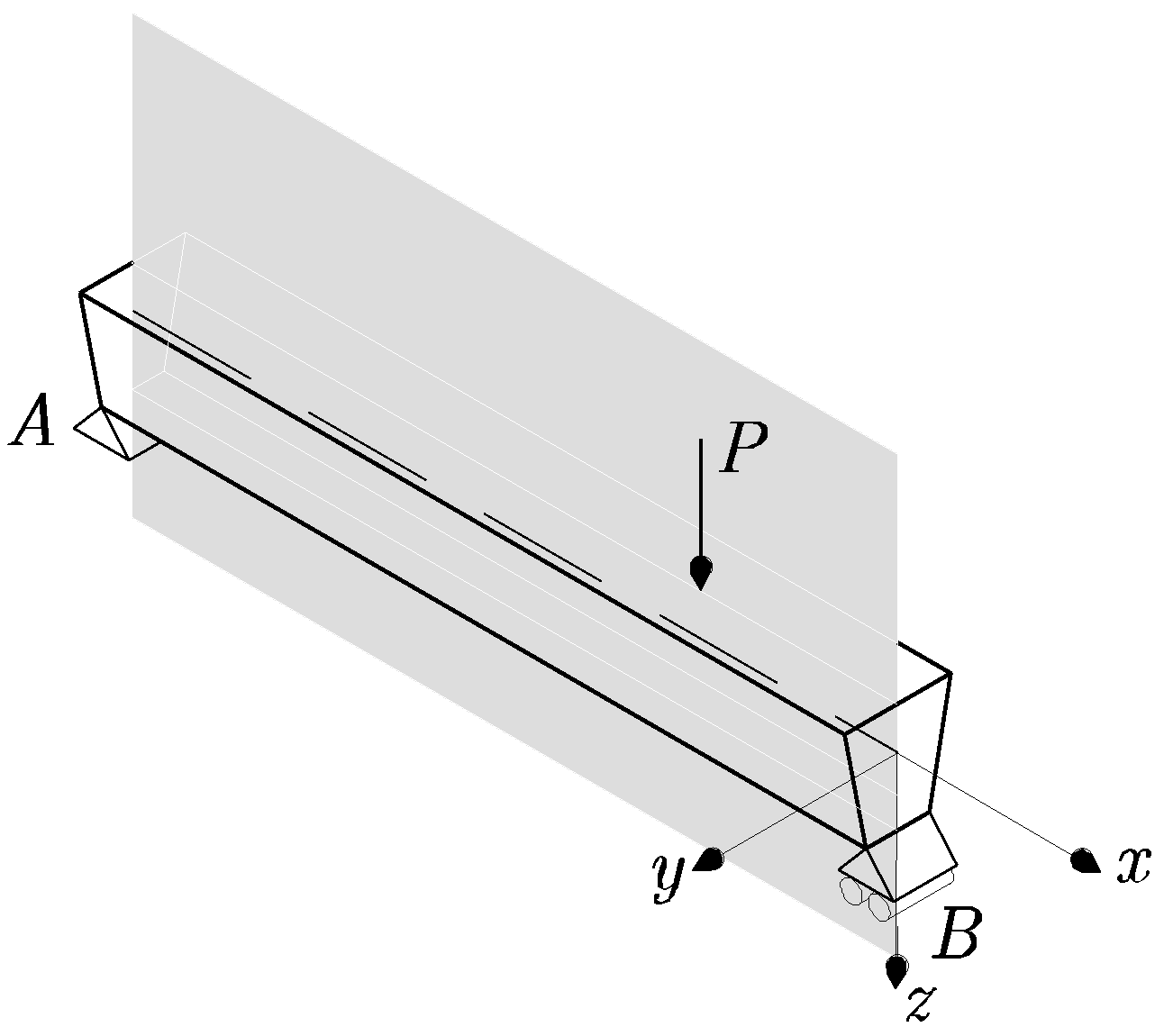
Sea la barra biapoyada que se muestra en la Figura 6.8. La barra presenta simetría respecto al plano XZ. La carga vertical P está contenida en dicho plano XZ, siendo los ejes y y z de la sección los ejes principales de inercia.
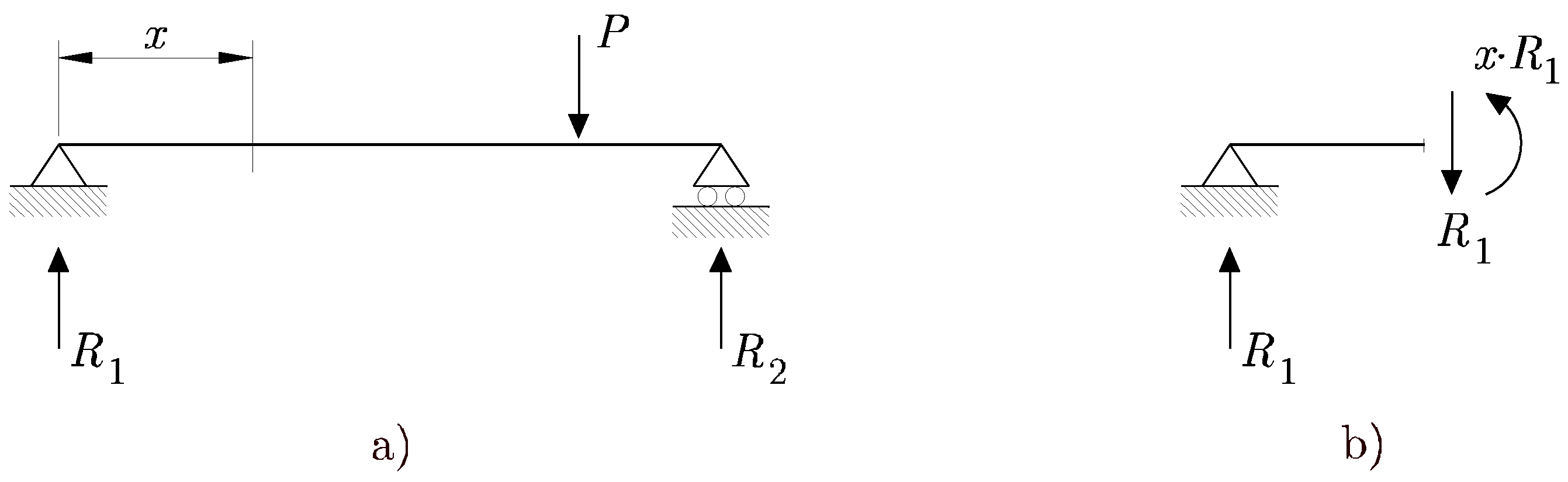
La carga P se transmite a los apoyos generándose en éstos las reacciones ![]() y
y ![]() , que también estarán contenidas en el plano XZ, como se muestra en la Figura 6.9 a), donde se ha dibujado solo la directriz de la barra. Aislando un trozo de barra e imponiendo su equilibrio, deben actuar sobre la sección de corte una fuerza vertical que equilibre la reacción y un momento, el cual es necesario para el equilibrio de momentos, como se muestra en la Figura 6.9 b). El momento se produce alrededor del eje y, y la fuerza vertical
, que también estarán contenidas en el plano XZ, como se muestra en la Figura 6.9 a), donde se ha dibujado solo la directriz de la barra. Aislando un trozo de barra e imponiendo su equilibrio, deben actuar sobre la sección de corte una fuerza vertical que equilibre la reacción y un momento, el cual es necesario para el equilibrio de momentos, como se muestra en la Figura 6.9 b). El momento se produce alrededor del eje y, y la fuerza vertical ![]() está contenida en el plano XZ.
está contenida en el plano XZ.
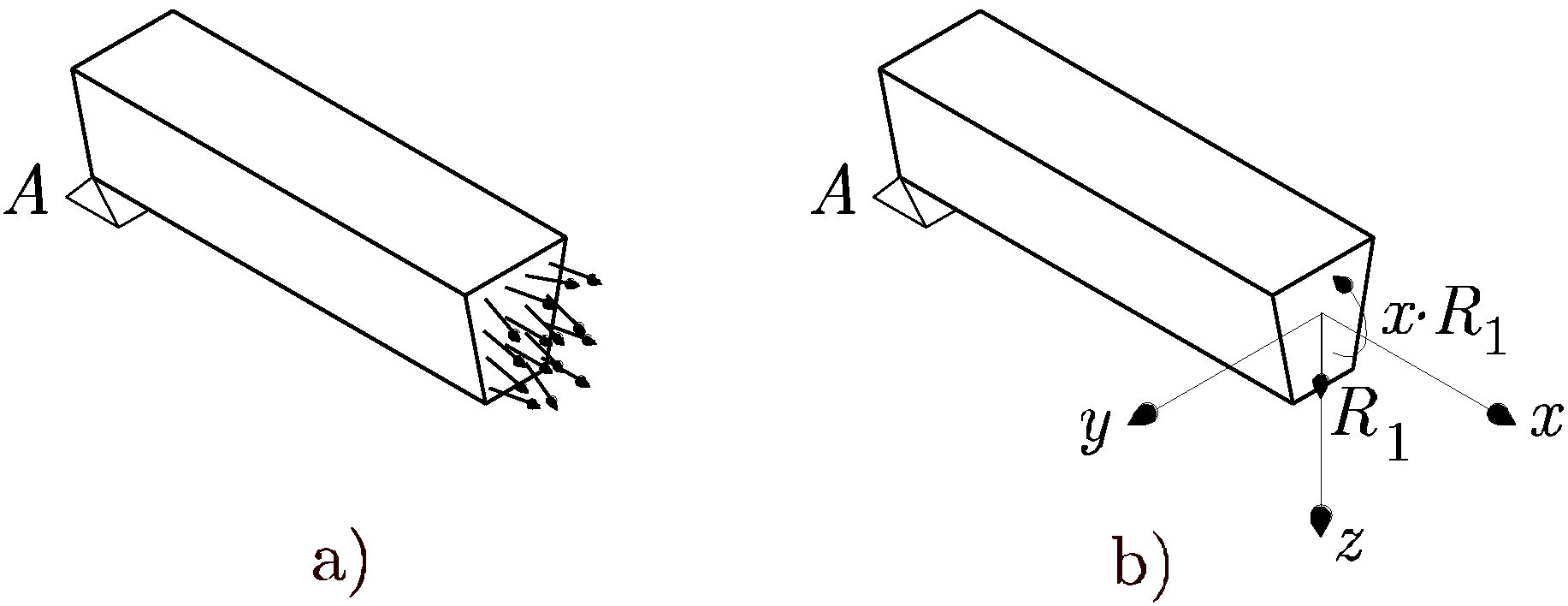
La transmisión de una parte
![]() de la carga P desde su punto de aplicación hasta el apoyo izquierdo, se realiza al desarrollar el material un estado tensional estáticamente equivalente a una fuerza y a un momento en cada sección. En este caso concreto, la fuerza vertical es la resultante de la distribución de tensiones tangenciales
de la carga P desde su punto de aplicación hasta el apoyo izquierdo, se realiza al desarrollar el material un estado tensional estáticamente equivalente a una fuerza y a un momento en cada sección. En este caso concreto, la fuerza vertical es la resultante de la distribución de tensiones tangenciales ![]() en el área de la sección, y el momento está causado por las tensiones normales
en el área de la sección, y el momento está causado por las tensiones normales ![]() , como se muestra en las Figuras 6.10 a) y b).
, como se muestra en las Figuras 6.10 a) y b).
A partir de este ejemplo sencillo se pueden definir los esfuerzos como las fuerzas y los momentos estáticamente equivalentes a la distribución de vectores tensión que debe desarrollar el material en los puntos de cada sección para transmitir las cargas exteriores.
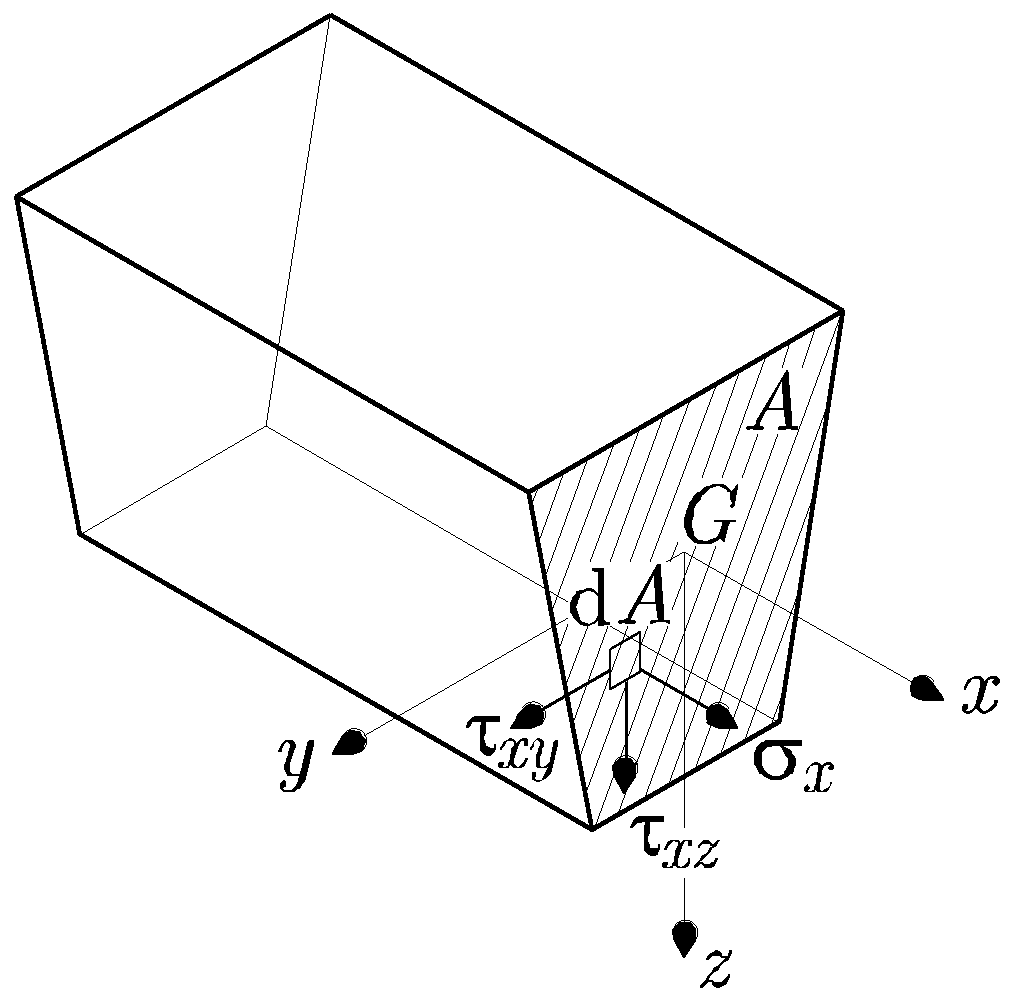
En el caso más general, la sección de una barra estará sometida a un estado tensional similar al que se muestra en la Figura 6.11, estáticamente equivalente seis esfuerzos: un esfuerzo axil, dos esfuerzos cortantes, un momento torsor y dos momentos flectores.
El esfuerzo axil
![]() se define como la fuerza resultante de integrar las tensiones normales
se define como la fuerza resultante de integrar las tensiones normales
![]() en el área de la sección:
en el área de la sección:
Los esfuerzos cortantes
![]() y
y
![]() se definen como las fuerzas resultantes de integrar las tensiones tangenciales
se definen como las fuerzas resultantes de integrar las tensiones tangenciales
![]() y
y
![]() , respectivamente, en el área de la sección:
, respectivamente, en el área de la sección:
Se considerará que el axil y los cortantes son positivos cuando, actuando en una sección de normal positiva, llevan la dirección positiva de los ejes, o cuando en una cara de normal negativa llevan el sentido contrario.
En la figura 6.12 se muestran los esfuerzos axil y cortantes sobre una sección de una barra prismática.
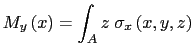
Los momentos flectores
![]() y
y
![]() resultan de integrar en el área de la sección los momentos que producen las fuerzas normales
resultan de integrar en el área de la sección los momentos que producen las fuerzas normales
![]() d
d![]() respecto a los ejes y y z, respectivamente:
respecto a los ejes y y z, respectivamente:
![]() se considerará positivo si lleva el sentido positivo del eje y.
se considerará positivo si lleva el sentido positivo del eje y.
![]() se considerará positivo si lleva el sentido negativo del eje z.
se considerará positivo si lleva el sentido negativo del eje z.
Por último, el momento torsor
![]() es el resultante de integrar en el área de la sección los momentos que originan las fuerzas tangenciales
es el resultante de integrar en el área de la sección los momentos que originan las fuerzas tangenciales
![]() d
d![]() y
y
![]() d
d![]() respecto al eje x:
respecto al eje x:
El sentido positivo es el del eje x.
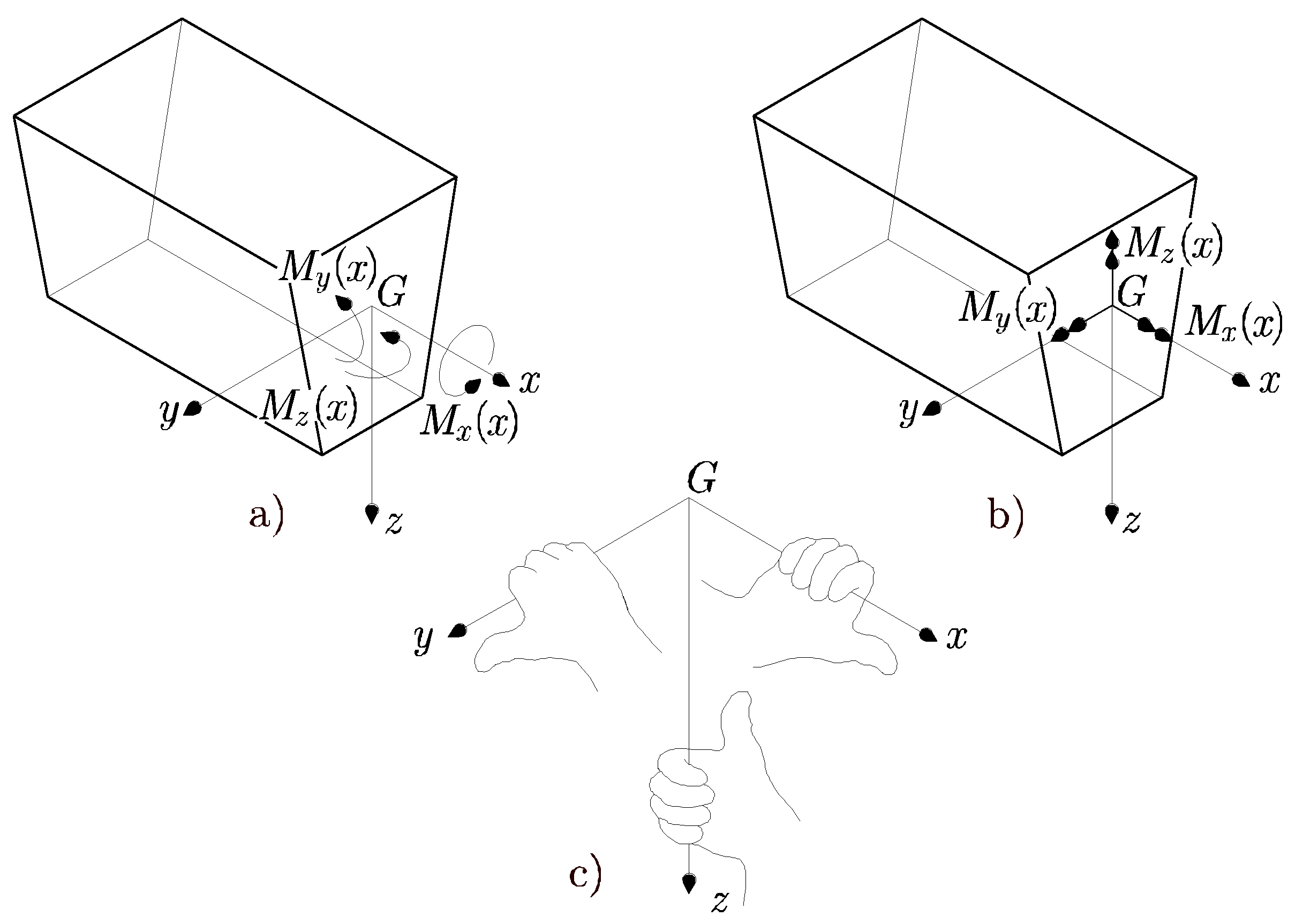
En la Figura 6.13 a) y en la Figura 6.13 b) se muestran dos formas de representar los momentos flectores y torsor. En la representación de la Figura 6.13 b) se utiliza el vector con doble flecha para indicar el sentido del momento de acuerdo a la regla de la mano derecha, como se muestra en la Figura 6.13 c). Según el criterio adoptado, valores positivos de
![]() y
y
![]() implica que ambos momentos producen tracciones en el primer cuadrante.
implica que ambos momentos producen tracciones en el primer cuadrante.
De las ecuaciones (6.3) a (6.8), se deduce que los esfuerzos son función, exclusivamente, de la coordenada x que se considere. Es decir, se ha pasado de un modelo tridimensional, planteado en elasticidad, a un modelo de barra que es unidimensional. Se admitirá que cualquier esfuerzo es constante en toda la sección.
 d
d d
d d
d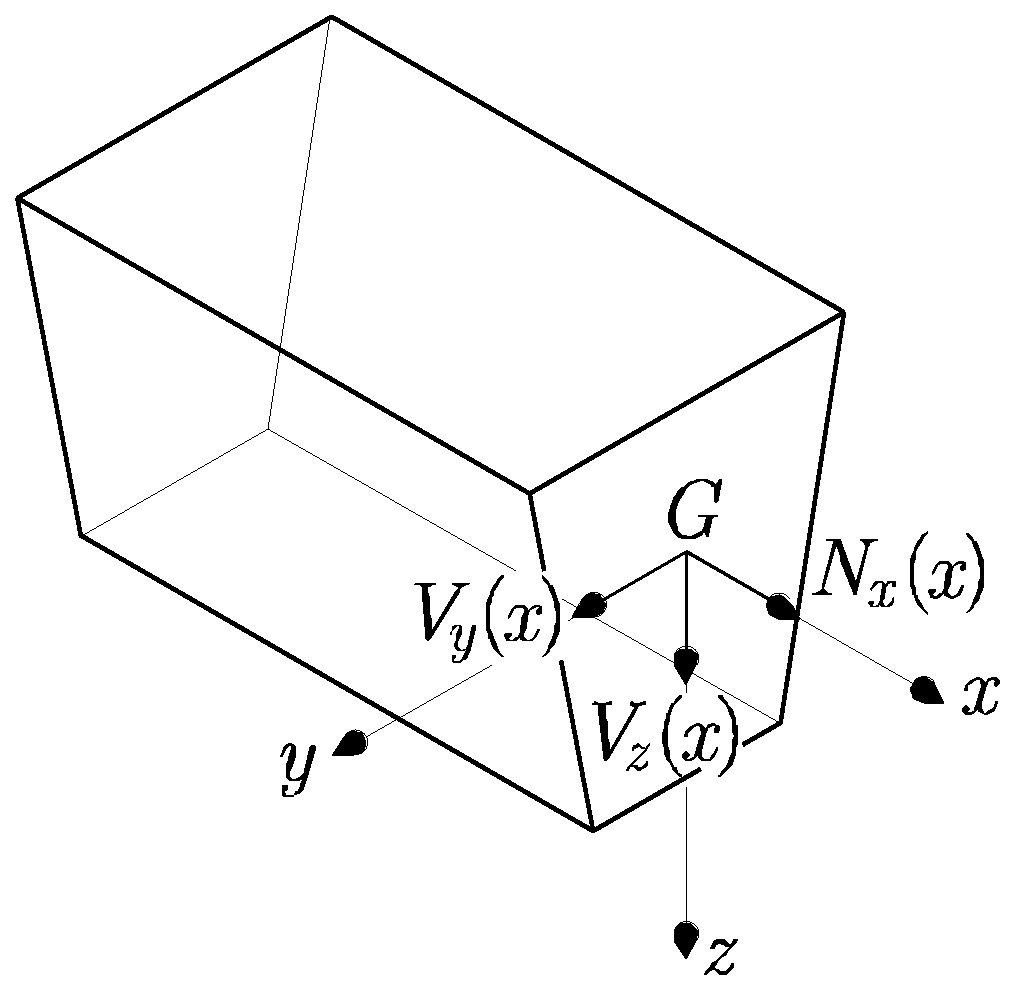
 d
d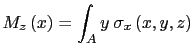 d
d d
d