| t |
Mediante la fórmula de Cauchy en forma matricial
| t |
conocido el tensor de tensiones
![]() , se obtiene el vector tensión correspondiente a un determinado plano multiplicando el tensor de tensiones por el vector unitario
, se obtiene el vector tensión correspondiente a un determinado plano multiplicando el tensor de tensiones por el vector unitario
![]() normal a dicho plano.
normal a dicho plano.
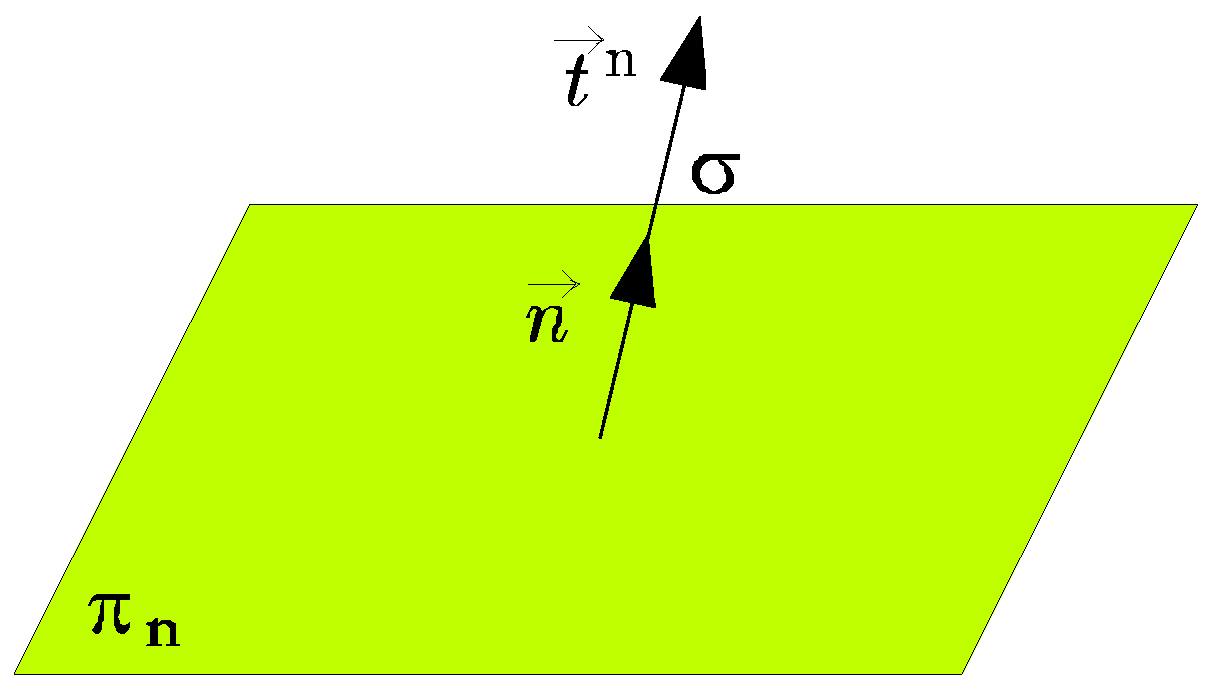
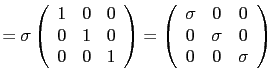
Si la dirección del vector normal y del vector tensión coinciden, Figura 3.11, la componente intrínseca tangencial es nula, existiendo solamente componente intrínseca normal. En este caso, se verifica, continuando en notación matricial
o bien, pasando al primer miembro
siendo
![]() el tensor de tensiones, I la matriz identidad y
el tensor de tensiones, I la matriz identidad y ![]() el módulo de la tensión normal. Por tanto,
el módulo de la tensión normal. Por tanto,
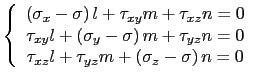
La ecuación (3.30) es un sistema de tres ecuaciones algebraicas homogéneas lineales, con los cosenos directores
![]() como incógnitas. Además, las incógnitas deben satisfacer, por el carácter unitario del vector normal, la ecuación
como incógnitas. Además, las incógnitas deben satisfacer, por el carácter unitario del vector normal, la ecuación
Desarrollando la ecuación (3.30), se tiene
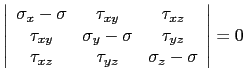
Los tres cosenos directores no pueden ser todos cero, ya que deben satisfacer la ecuación (3.33). Para que un sistema de ecuaciones homogéneas lineales tenga solución distinta de la trivial, es condición necesaria y suficiente que el determinante de la matriz de coeficientes sea igual a cero
Al desarrollar este determinante se obtiene una ecuación cúbica, denominada ecuación característica
siendo
Las raíces, ![]() siendo i = 1,2,3, de la ecuación característica (los valores propios de
siendo i = 1,2,3, de la ecuación característica (los valores propios de
![]() ) reciben el nombre de tensiones principales, y las direcciones correspondientes (los vectores propios de
) reciben el nombre de tensiones principales, y las direcciones correspondientes (los vectores propios de
![]() ) reciben el nombre de direcciones principales. Se convendrá que
) reciben el nombre de direcciones principales. Se convendrá que ![]() es la raíz mayor (algebraicamente) y
es la raíz mayor (algebraicamente) y ![]() la menor. En todo punto interior de un sólido elástico existen, si el determinante de la matriz de tensiones es distinto de cero, tres direcciones ortogonales entre sí, que son las direcciones de las tensiones principales. Los valores de las tensiones principales son independientes del sistema de referencia adoptado, y son los valores máximos y mínimos que pueden adoptar las componentes del vector tensión en el entorno del punto considerado. Esto implica que las raíces de la ecuación característica son invariantes. Esta afirmación responde a la primera de las preguntas planteadas en el último párrafo del apartado 3.1, concretamente, como era posible obtener información del estado tensional de un sólido si la magnitud que lo define varía según en plano que la considere.
la menor. En todo punto interior de un sólido elástico existen, si el determinante de la matriz de tensiones es distinto de cero, tres direcciones ortogonales entre sí, que son las direcciones de las tensiones principales. Los valores de las tensiones principales son independientes del sistema de referencia adoptado, y son los valores máximos y mínimos que pueden adoptar las componentes del vector tensión en el entorno del punto considerado. Esto implica que las raíces de la ecuación característica son invariantes. Esta afirmación responde a la primera de las preguntas planteadas en el último párrafo del apartado 3.1, concretamente, como era posible obtener información del estado tensional de un sólido si la magnitud que lo define varía según en plano que la considere.
Puesto que las raíces de la ecuación característica (las tensiones principales) no dependen de la elección del sistema de referencia, los coeficientes de dicha ecuación tampoco dependen del sistema de referencia. Así pues, las expresiones de ![]() ,
, ![]() e
e ![]() son escalares invariantes, concretamente, se denominan invariante lineal, invariante cuadrático e invariante cúbico, respectivamente.
son escalares invariantes, concretamente, se denominan invariante lineal, invariante cuadrático e invariante cúbico, respectivamente.