Conocido el tensor de tensiones, el vector tensión
![]() sobre un plano de normal
sobre un plano de normal
![]() viene dado por la fórmula de Cauchy (en notación matricial)
viene dado por la fórmula de Cauchy (en notación matricial)
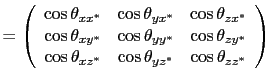
Las componentes del tensor de tensiones están referidas a un sistema de referencia ![]() como se muestra en la Figura 3.10 a).
como se muestra en la Figura 3.10 a).
 |
Se considerará un nuevo sistema de referencia ortogonal con el mismo origen que el anterior, pero con distinta orientación como se muestra en la Figura 3.10 b). ¿Cuáles serán las componentes del tensor de tensiones en este nuevo sistema?
En lo que sigue de apartado se utilizará notación matricial. Sea
![]() el tensor de tensiones referido a este nuevo sistema. El vector tensión
t
el tensor de tensiones referido a este nuevo sistema. El vector tensión
t![]() n*, correspondiente a un plano cuya orientación viene definida por el vector unitario
n*, correspondiente a un plano cuya orientación viene definida por el vector unitario
![]() , es
, es
Los vectores tensión en ambos sistemas, referidos al mismo plano, están relacionados mediante la matriz de rotación de ejes R por la ecuación
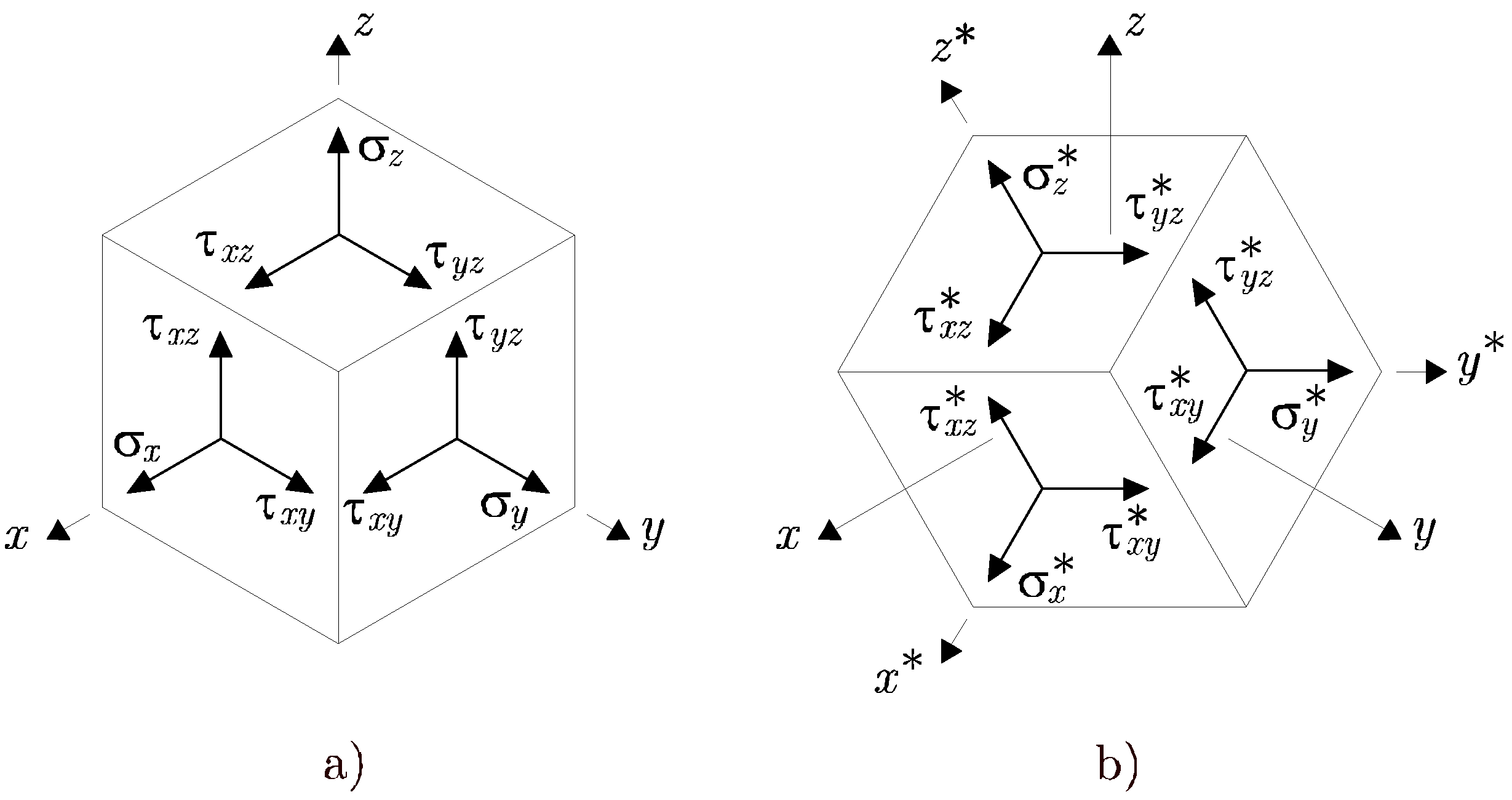
Las filas de la matriz de rotación de ejes son los cosenos de los ángulos formados por cada eje nuevo con los antiguos, medidos en sentido antihorario del antiguo al nuevo sistema,
Las componentes de los vectores unitarios en ambos sistemas de referencia están ligadas por la relación
Al ser la matriz de cambio de ejes ortogonal (por pasar de un sistema de coordenadas ortogonal dextrógiro a otro sistema de coordenadas ortogonal dextrógiro), su inversa es igual a la traspuesta,
R![]() R
R![]() T. Por tanto, se cumple
T. Por tanto, se cumple
Teniendo en cuenta las expresiones (3.21), (3.22), (3.23) y (3.24), se tiene
Es decir
y dividiendo por
![]()
La ecuación (3.29) permite obtener el tensor de tensiones en cualquier sistema de referencia conocidos el tensor en otro sistema de referencia y la matriz de rotación de ejes entre ambos sistemas.