En todo punto de un sólido donde esté definido el tensor de pequeñas deformaciones, se tiene que para cada dirección
![]() hay asociado un vector deformación
hay asociado un vector deformación
![]() que se calcula mediante la expresión matricial
que se calcula mediante la expresión matricial
Si se utiliza el vector unitario de
![]() , denominado
, denominado
![]() , se obtiene el vector deformación unitaria
, se obtiene el vector deformación unitaria
![]()
siendo ![]() los cosenos directores (las componentes) del vector
los cosenos directores (las componentes) del vector
![]() .
.
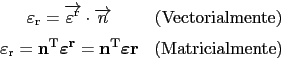
La componente intrínseca normal, la deformación normal, es la proyección del vector deformación
![]() sobre
sobre
![]() . Se obtiene mediante las expresiones
. Se obtiene mediante las expresiones
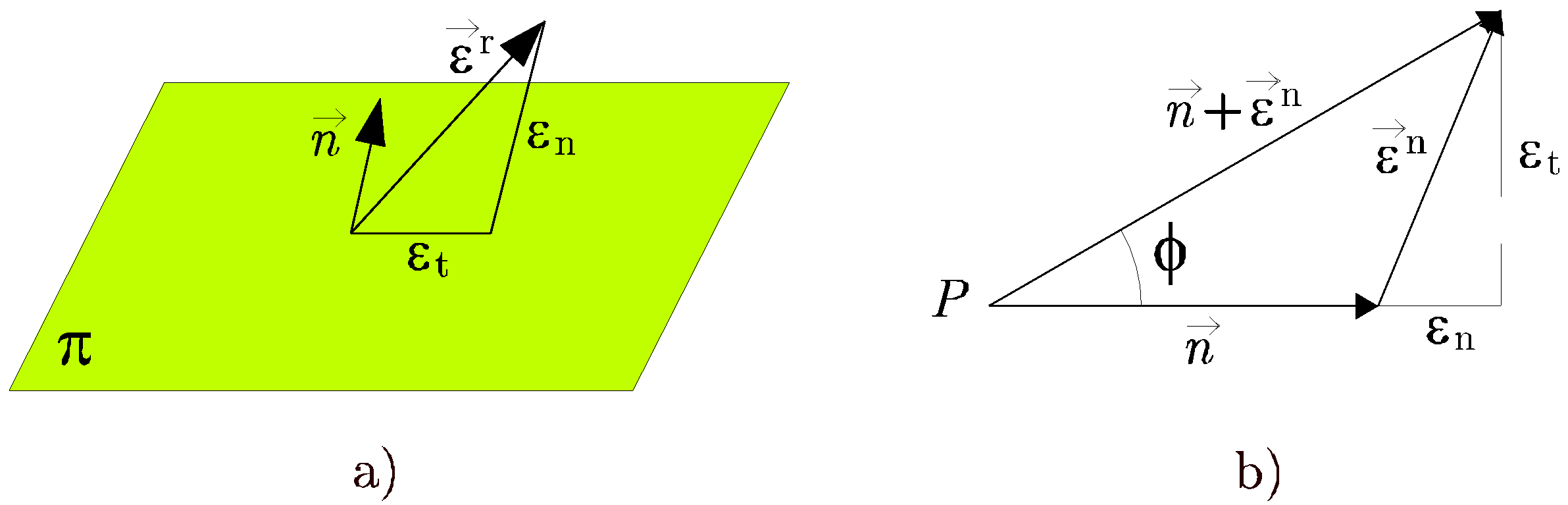
La Figura 2.8 a) muestra gráficamente esta proyección. El vector deformación unitaria
![]() se calcula mediante la expresión
se calcula mediante la expresión
La componente intrínseca tangencial (la deformación tangencial o transversal)
![]() t se define como la proyección del vector deformación sobre el plano perpendicular a
t se define como la proyección del vector deformación sobre el plano perpendicular a
![]() , tal como se muestra en la Figura 2.8 a). Se calcula mediante la expresión
, tal como se muestra en la Figura 2.8 a). Se calcula mediante la expresión
y para el vector deformación unitaria se calcula mediante la expresión
siendo
![]() el vector tangente al plano y perpendicular a
el vector tangente al plano y perpendicular a
![]() . La deformación tangencial también puede obtenerse vectorialmente, para el vector deformación, como
. La deformación tangencial también puede obtenerse vectorialmente, para el vector deformación, como
y para el vector deformación unitaria como
La deformación angular ![]() , que se representa en la Figura 2.8 b), coincide con la deformación tangencial unitaria
, que se representa en la Figura 2.8 b), coincide con la deformación tangencial unitaria
![]() expresada en radianes.
expresada en radianes.